Радиолокация: зарождение и развитие
Содержание:
- Классификация
- «Важное направление»
- Опыты с электромагнитными волнами Г.Герца и А.Попова
- Литература
- «Крестные отцы» радара
- «Получать больше информации»
- История развития радиолокации
- Принцип действия
- Эстафета переходит в Германию
- Примечания
- Физика процесса: эффект Доплера, или «умное эхо»
- Вторичный радиолокатор
- Принцип радиотелефонной связи
- В чем разница между первичным и вторичным радиолокаторами?
Классификация
Выделяют два вида радиолокации:
- Пассивная радиолокация основана на приёме собственного излучения объекта;
- При активной радиолокации радар излучает свой собственный зондирующий сигнал и принимает его отражённым от цели. В зависимости от параметров принятого сигнала определяются характеристики цели.
Активная радиолокация бывает двух видов:
Активная радиолокация с пассивным ответом
- С активным ответом — на объекте предполагается наличие радиопередатчика (ответчика), который излучает радиоволны в ответ на принятый сигнал. Активный ответ применяется для опознавания объектов (свой-чужой), дистанционного управления, а также для получения от них дополнительной информации (например, количество топлива, тип объекта и т. д.);
- С пассивным ответом — запросный сигнал отражается от объекта и воспринимается в пункте приёма как ответный.
Для просмотра окружающего пространства РЛС использует различные способы обзора за счёт перемещения направленного луча антенны РЛС:
- круговой;
- секторный;
- обзор по винтовой линии;
- конический;
- по спирали;
- «V» обзор;
- линейный (самолёты ДРЛО типа Ан-71 и А-50 (Россия) или американские с системой Авакс).
В соответствии с видом излучения РЛС делятся на:
- РЛС непрерывного излучения;
- Импульсные РЛС.
«Важное направление»
Как пояснили RT эксперты, все три станции работают в едином разведывательном контуре, обеспечивая огневые средства ПВО информацией об опасных воздушных целях. «Каста-2-2» и «Гамма-С1» являются комплексами кругового обзора, а «Подлёт» — радаром для поиска аэродинамических и баллистических объектов.
«Эти радары необходимы для увеличения зоны обзора. У них разные диапазоны, и они дополняют друг друга — это называется комплексирование. Это нормальная история, так как на современном театре военных действий встречаются разнородные цели, а универсальной платформы для их обнаружения не существует», — рассказал в беседе с RT основатель портала Military Russia Дмитрий Корнев.
Также по теме

«Новая геополитическая реальность»: как современное оружие усиливает безопасность России
Президент России Владимир Путин провёл заключительную встречу в осенней серии совещаний на оборонную тематику с участием военных,…
В декабре прошлого года начальник радиотехнических войск ВКС России генерал-майор Андрей Кобан в интервью газете «Красная звезда» заявил, что в РТВ ширится практика использования мобильных частей, то есть формирований, оснащённых самоходными РЛС. Такой подход позволяет оперативно наращивать боевые возможности на угрожаемых направлениях.
По словам военачальника, каждое такое подразделение радиотехнических войск «способно вести радиолокационную разведку над территорией, по площади сравнимой с Францией или Германией».
«Важное направление развития систем радиолокационного вооружения — повышение их мобильности. Сегодня военная техника РТВ — это реализация самых последних разработок в области радиолокации и обработки информации», — сказал Кобан
К числу современных средств разведки военачальник отнёс «Касту-2-2». Как следует из информации Минобороны РФ, данная РЛС необходима для «определения дальности, азимута, эшелона высоты полёта и трассовых характеристик воздушных объектов: самолётов, вертолётов, дистанционно пилотируемых летательных аппаратов и крылатых ракет, в том числе летящих на малых и предельно малых высотах».
Также комплекс способен обнаруживать «движущиеся объекты на поверхности моря» и летательные аппараты, выполненные с применением технологий радиолокационной малозаметности («стелс»).
Оборудование станции размещается на трёх автомобилях повышенной проходимости КамАЗ-4310.
По данным «Рособоронэкспорта», станция может применяться в системах ПВО, береговой обороны, пограничного контроля, управления воздушным движением и контроля воздушного пространства в аэродромных зонах. Её главное преимущество заключается в способности обнаруживать низколетящие цели.
«Каста-2-2» работает в дециметровом диапазоне. Зона обзора РЛС по дальности составляет 5—150 км, по высоте — до 6 км, по азимуту — 360 градусов. Станция способна сопровождать не менее 50 целей.

- Президент РФ Владимир Путин и представители военного руководства на экспозиции новейших РЛС, включая радар «Каста-2-2»
- РИА Новости
Разработчиком «Касты» является «АО Всероссийский научно-исследовательский институт радиотехники» (ВНИИРТ). Это же предприятие создало РЛС сантиметрового диапазона «Гамма-С1».
Данная станция монтируется на трёх машинах на шасси КрАЗ-260Г либо БАЗ-69092-013. Её оборудование состоит из фазированной антенной решётки (ФАР), цифровой системы обработки данных, средств подавления помех, аппаратуры автоматизации процессов обнаружения целей и управления режимами работы.
Как сообщается на сайте Минобороны РФ, «Гамма-С1» способна сопровождать широкий класс современных и перспективных воздушных целей, «включая авиационные ракеты, в условиях воздействия естественных и преднамеренных помех».
Дальность обнаружения целей у «Гаммы-С1» составляет от 10 до 300 км, количество сопровождаемых целей — не менее 100 единиц, время развёртывания — 40 минут, численность расчёта — три человека.
Опыты с электромагнитными волнами Г.Герца и А.Попова
В 1888 г. выдающийся немецкий учёный Генрих Герц опытным путём подтвердил существование электромагнитных волн. Опыты Герца заключались в отражении луча рефлектора от металлического листа, установленного на его пути. Отражаясь от него, луч попадал к приёмнику и «сигнализировал» о своём существовании. Стоило убрать лист — сигнализация прекращалась.
 Генрих Рудольф Герц
Генрих Рудольф Герц
Герц научился генерировать и улавливать электромагнитные радиоволны и обнаружил, что они по-разному поглощаются и отражаются различными материалами
И прежде всего внимание учёного здесь привлекло само существование известных раннее лишь в теории электромагнитных волн. Но он даже и не задумался о каком-либо практическом применении свойств этих волн — направленности и отражении
Спустя немного времени, наш соотечественник А.С. Попов впервые нашёл практическое применение для электромагнитных волн, создав грозоотметчик (приёмник электромагнитных волн природного происхождения, который лёг в основу появившегося после радио). Позже А.С
Попов сделал ещё одно важное открытие: в 1897 году во время опытов по радиосвязи на Балтийском море зарегистрировал влияние корабля, пересекающего трассу радиоволн, на силу сигнала
В своём отчете о проведении опытов учёный писал следующее:
 Александр Степанович Попов
Александр Степанович Попов
Литература
- Поляков В. Т. Посвящение в радиоэлектронику. — М.: Радио и связь, 1988. — 352 с. — (МРБ. Выпуск 1123). — 900 000 экз. — ISBN 5-256-00077-2.
- Леонов А. И. Радиолокация в противоракетной обороне. — М.: Воениздат, 1967. — 136 с. — (Радиолокационная техника).
- Радиолокационные станции бокового обзора / Под редакцией А. П. Реутова. — М.: Советское радио, 1970. — 360 с. — 6700 экз.
- Радиолокационные станции воздушной разведки / Под редакцией Г. С. Кондратенкова. — М.: Воениздат, 1983. — 152 с. — 18 000 экз. — ISBN 200001705124.
- Мищенко Ю. А. Загоризонтная радиолокация. — М.: Воениздат, 1972. — 96 с. — (Радиолокационная техника).
- Бартон Д. Радиолокационные системы / Сокращённый перевод с английского под редакцией К. Н. Трофимова. — М.: Воениздат, 1967. — 480 с.
- Шембель Б. К. У истоков радиолокации в СССР. — М.: Советское радио, 1977. — 80 с.
- Водопьянов Ф. А. . Радиолокация. — М., 1946.
- Рыжов К. В. 100 великих изобретений. — М.: Вече, 2009. — 480 с. — (100 великих). — ISBN 5-7838-0528-9.
- Bowen, Edward George. Radar Days. — CRC Press, 1998. — ISBN 9780750305860.
- Центральная радиолаборатория в Ленинграде // Под ред. И. В. Бренёва. — М.: Советское радио, 1973.
- Военно-исторический музей артиллерии, инженерных войск и войск связи. Коллекция документов генерал-лейтенанта М. М. Лобанова по истории развития радиолокационной техники. Ф. 52Р оп. № 13
- Лобанов М. М. Из прошлого радиолокации: Краткий очерк. — М.: Воениздат, 1969. — 212 с. — 6500 экз.
- Лобанов М. М. Мы —— военные инженеры. — М.: Воениздат, 1977. — 223 с.
-
Лобанов М. М. Глава седьмая. О Совете по радиолокации при Государственном комитете обороны // Начало советской радиолокации. — М.: Советское радио, 1975. — 288 с.
«Крестные отцы» радара
Как и в случае со многими другими изобретениями, дату точного создания радара и имя его создателя зафиксировать сложно. В первой половине XX века ученые ведущих стран двигались параллельными путями, приходя к тем или иным решениям иногда практически одновременно. А появление таких сложных устройств, как радар, всегда является результатом работы многих людей и коллективов. Однако историки едины во мнении, что приближающаяся Вторая мировая война стала своего рода ускорителем для многих ключевых технологий XX века, в том числе и для радиолокации.
Теоретические основы для радиообнаружения объектов были заложены еще в конце XIX века, но для их практического воплощения потребовались еще долгие годы и изобретение большого количества вспомогательных для радиолокатора устройств и технологий. За пальму первенства в создании радара в условиях секретности боролись технологические лидеры – Великобритания, Германия, США, Франция и СССР.
Еще в 1886 году немецкий физик Генрих Герц обнаружил, что радиоволны способны отражаться телами. А в 1897 году «отец радио» Александр Попов при испытаниях радиоприемника поймал радиоволны, отраженные от металла корабля, попавшего между передатчиком и приемником. В 1900 году Никола Тесла предположил, что объекты на земле и в воздухе можно находить с помощью отраженных электромагнитных волн.
«Получать больше информации»
Станция «Подлёт» — ещё одно детище специалистов ВНИИРТ, которое широко используется радиотехническими войсками. Аппаратура комплекса монтируется на шасси КамАЗ. Она включает пост с антенным радаром, оснащённым ФАР, кунг (кузов-фургон) управления и электрогенератор.
В учебном пособии «Тактика Военно-воздушных сил», опубликованном на сайте Московского авиационного института (МАИ), сообщается, что радар использует дециметровый диапазон волн. Станция применяется для фиксации самолётов, вертолётов, ракет и целей, выполненных по технологии «стелс». Полученные данные передаются на командные пункты, истребителям и зенитным подразделениям.
Также по теме

«Алгоритмы искусственного интеллекта»: в чём особенность российского боевого вертолётного дрона «Термит»
В России завершаются опытно-конструкторские работы по первому отечественному разведывательно-ударному БПЛА вертолётного типа «Термит»….
В радиотехнических войсках РФ эксплуатируется несколько модификаций этой РЛС. Новейшей из них является «Подлёт-К1».
РЛС «Подлёт-К1» предназначена для обнаружения аэродинамических и баллистических объектов, определения их дальности, скорости, высоты и государственной принадлежности. Станция отличается высокой помехоустойчивостью, максимальной автоматизацией всех процессов и операций боевой работы», — говорится в материалах Минобороны РФ.
Дальность действия радара «Подлёт-К1» составляет 10—300 км, максимальная высота сканирования воздушного пространства — 200 км.
По мнению эксперта, радиолокационная разведка сохраняет большое значение для обеспечения безопасности воздушных границ России. Согласно официальной информации Минобороны РФ, в 2020 году мобильные подразделения РТВ зафиксировали более 2 млн воздушных объектов и выявили больше 1 тыс. фактов полёта иностранных самолётов-разведчиков у границ России.

- Тренировка радиотехнических войск РФ
Как подчеркнул Корнев, без РЛС, в том числе самоходных, организация противовоздушной обороны невозможна в принципе. Роль радаров очень велика, в первую очередь как средства целеуказания пусковым установкам зенитных ракетных комплексов (ЗРК), отметил собеседник RT.
«Без РЛС не может быть системы ПВО. Благо российская радиотехническая школа позволяет создавать и модернизировать станции, обнаруживающие цели на самых разных расстояниях и высотах, от малоразмерных до крупных», — сказал Корнев.
Как полагает эксперт, в настоящее время стимулом для совершенствования отечественных РЛС является распространение зарубежных летательных аппаратов, изготовленных по технологиям «стелс». Кроме того, модернизация радиолокации РФ направлена на создание единого информационного поля в рамках эшелонированной системы ПВО.
Также по теме

«Неуязвимы для любых систем ПРО»: как ракеты «Булава» усиливают морской компонент ядерной триады РФ
Российские межконтинентальные баллистические ракеты Р-30 «Булава» неуязвимы для любой системы ПРО, заявил начальник штаба командования…
В свою очередь, директор музея ПВО в Балашихе Юрий Кнутов считает, что одним из магистральных трендов развития радиолокационной разведки РФ является повышение возможностей фиксации гиперзвуковых аппаратов и малозаметных беспилотников. В разговоре с RT эксперт подчеркнул, что уже сейчас у отечественной радиолокационной разведки есть ряд крупных достижений.
«На мой взгляд, в целом решена проблема обнаружения «стелс»-объектов, большой прогресс наблюдается и в области борьбы с гиперзвуковыми целями. Проводится интенсивная работа над улучшением помехозащищённости, повышением скорости и объёма передачи радиолокационных данных», — отметил Кнутов.
По прогнозу эксперта, в ближайшее время радиотехнические войска РФ начнут получать модернизированные и новые станции с более высоким уровнем автоматизации, а на командных пунктах ПВО появятся компьютеры с элементами искусственного интеллекта, способные мгновенно выбирать наиболее оптимальный способ ликвидации воздушной угрозы.
Кроме того, Кнутов ожидает скорого прорыва в области радиофотоники — области физики, сконцентрированной на технологиях передачи информации внутри радиолокационной станции по оптическим каналам. В России подобные работы осуществляет АО «Концерн «РТИ Системы».
«Более масштабное использование оптического диапазона позволит значительно повысить помехоустойчивость и скорость работы с данными. Я думаю, что РЛС с элементами радиофотонных технологий появятся у России в ближайшие несколько лет», — подытожил Кнутов.
История развития радиолокации
Идея радиолокации возникла практически сразу после открытия радиоволн. В 1905 году сотрудник немецкой компании Siemens Кристиан Хюльсмейер создал устройство, которое с помощью радиоволн могло обнаружить крупные металлические объекты. Изобретатель предлагал устанавливать его на кораблях, чтобы они могли избегать столкновений в условиях плохой видимости. Однако судовые компании не заинтересовались новым прибором.

Несмотря на то что англичане вступили в «радарную» гонку позже американцев и немцев на финише они сумели обогнать их и подойти к началу Второй мировой войны с самой продвинутой системой радиолокационного обнаружения самолетов.
Уже в сентябре 1935 года англичане приступили к постройке сети радиолокационных станций, в состав которой перед войной уже входило двадцать РЛС. Она полностью перекрывала подлет к Британским островам со стороны европейского побережья. Летом 1940 года британскими инженерами был создан резонансный магнетрон, позже ставший основой бортовых радиолокационных станций, устанавливаемых на американских и британских самолетах.
https://youtube.com/watch?v=055tx9viDhE
Работы в области военной радиолокации велись и в Советском Союзе. Первые успешные эксперименты по обнаружению самолетов с помощью радиолокационных станций в СССР были проведены еще в середине 30-х годов. В 1939 году на вооружение РККА была принята первая РЛС РУС-1, а в 1940 году – РУС-2. Обе эти станции были запущены в серийное производство.
Сигналу РЛС с фазированной решеткой можно придавать любую необходимую форму, его можно перемещать в пространстве без изменения положения самой антенны, работать с разными частотами излучения. РЛС с фазированной решеткой гораздо надежней и чувствительней, чем радиолокатор с обычной антенной. Однако у подобных радаров есть и недостатки: большой проблемой является охлаждение РЛС с ФАР, кроме того, они сложны в производстве и дорого стоят.

Новые радиолокационные станции с фазированной решеткой устанавливаются на истребители пятого поколения. Эта технология используется в американской системе раннего предупреждения о ракетном нападении. Радиолокационный комплекс с ФАР будет установлен на новейший российский танк «Армата». Следует отметить, что Россия является одним из мировых лидеров в разработке радиолокаторов с ФАР.
Принцип действия
Радиолокация основана на следующих физических явлениях:
- Радиоволны рассеиваются на встретившихся на пути их распространения электрических неоднородностях (объектами с другими электрическими свойствами, отличными от свойств среды распространения). При этом отражённая волна, также, как и собственно, излучение цели, позволяет обнаружить цель.
- На больших расстояниях от источника излучения можно считать, что радиоволны распространяются прямолинейно и с постоянной скоростью, благодаря чему имеется возможность измерять дальность и угловые координаты цели (Отклонения от этих правил, справедливых только в первом приближении, изучает специальная отрасль радиотехники — Распространение радиоволн. В радиолокации эти отклонения приводят к ошибкам измерения).
- Частота принятого сигнала отличается от частоты излучаемых колебаний при взаимном перемещении точек приёма и излучения (эффект Доплера), что позволяет измерять радиальные скорости движения цели относительно РЛС.
- Пассивная радиолокация использует излучение электромагнитных волн наблюдаемыми объектами, это может быть тепловое излучение, свойственное всем объектам, активное излучение, создаваемое техническими средствами объекта, или побочное излучение, создаваемое любыми объектами с работающими электрическими устройствами.
Эстафета переходит в Германию
В 1904 году немец Христиан Хюльсмейер запатентовал устройство под названием телемобилоскоп. Этот прибор предполагалось использовать в судоходстве для обнаружения кораблей в условиях плохой видимости. Телемобилескоп был построен на основе искрового генератора радиоволн и в своей последней версии мог находить суда на расстоянии до 3 км. Однако устройством не заинтересовались ни гражданские, ни военные, предпочитая по старинке пользоваться на судах паровыми ревунами. По сути прибор Хюльсмайера был еще не радаром, а радиодетектором. Существовавшие на тот момент технологии еще не позволяли построить полноценный радиолокатор.
Схема установки антенны радиолокатора «Зеетакт» на немецкой подводной лодке
В 1920-1930-е годы немецкие ученые и инженеры достигли больших успехов в развитии военной радиолокации. В 1935 году физик Рудольф Кунхольд из Института технологий связи германских ВМС представил радиолокационный прибор с электронно-лучевым дисплеем. К концу 1930-х на его основе были созданы оперативные радиолокаторы «Зеетакт» для флота и «Фрейя» для ПВО.
Однако, несмотря на значительные научные результаты, руководство Третьего рейха рассчитывало на блицкриг и не спешило развивать национальную сеть радаров, считая их преимущественно оборонительными средствами. К 1940 году Германия располагала лишь небольшой сетью станций дальнего обнаружения. И только к концу 1943 года территорию Германии полностью накрыли защитным радиолокационным «колпаком».
Примечания
- . TheFreeDictionary.com. Дата обращения 30 декабря 2015.
- Translation Bureau. . Public Works and Government Services Canada (2013). Дата обращения 8 ноября 2013.
- McGraw-Hill dictionary of scientific and technical terms / Daniel N. Lapedes, editor in chief. Lapedes, Daniel N. New York ; Montreal : McGraw-Hill, 1976. , 1634, A26 p.
- , с. 13.
- .
- Angela Hind. . BBC News (5 февраля 2007).
- ↑ .
- ↑ Справочник по радиоэлектронным системам / под ред. Б. В. Кривицкого. — М.: Энергия, 1979. — Т. 2. — С. 75—206. — 368 с.
- , с. 15—17.
-
Слюсар, В.И. . Разделы 9.3 – 9.8 в книге «Широкополосные беспроводные сети передачи информации». / Вишневский В.М., Ляхов А.И., Портной С.Л., Шахнович И.В. – М.: Техносфера. – 2005. C. 498 – 569 (2005).
-
Слюсар, В.И. . Электроника: наука, технология, бизнес. – 2001. – № 3. C. 42 – 46. (2001).
- Слюсар, В.И. (недоступная ссылка). Специальная техника и вооружение. – Февраль, 2002. – № 1,2. С. 17 – 23. (2002). Дата обращения 7 августа 2017.
- В. Г. Дождиков, Ю. С. Лифанов, М. И. Салтан ; под ред. В. Г. Дождикова. Энциклопедический словарь по радиоэлектронике, оптоэлектронике и гидроакустике / В. Г. Дождиков. — Москва: Энергия, 2008. — С. 600. — 611 с. — ISBN 978-5-98420-026-4 (В пер.).
Физика процесса: эффект Доплера, или «умное эхо»
Как и любое направление развития науки и техники, радиолокация базируется на некоторых физических основах, позволяющих обеспечивать решение стоящих перед ней задач, а именно: обнаруживать различного рода объекты и определять координаты и параметры их движения с помощью радиоволн.
Использование радиоволн, или, другими словами, электромагнитных колебаний (ЭМК), частотный диапазон которых сосредоточен в пределах от 3 кГц до 300 ГГц, определяет основные преимущества радиолокационных систем (РЛС) перед другими системами локации (оптическими, инфракрасными, ультразвуковыми). В первую очередь, это обусловлено тем, что закономерности распространения радиоволн в однородной среде достаточно стабильны как в любое время суток, так и в любое время года и, следовательно, изменение условий оптической видимости, обусловленных появлением дождя, снега, тумана или изменением времени суток, не нарушает работоспособность РЛС.
Основными закономерностями распространения радиоволн, которые позволяют обнаруживать объекты и измерять координаты и параметры их движения, являются следующие:
– постоянство скорости и прямолинейность распространения радиоволн в однородной среде (при проведении инженерных расчетов скорость распространения радиоволн принимают равной 3·10–8 м/с;
– способность радиоволн отражаться от различных областей пространства, электрические или магнитные параметры которых отличаются от аналогичных параметров среды распространения;
– изменение частоты принимаемого сигнала по отношению к частоте излученного сигнала при относительном движении источника излучения и приемника радиолокационного сигнала.
Последнее свойство радиоволн в радиолокации называют эффектом Доплера по имени австрийского ученого Кристиана Андреаса Доплера, который в 1842 году теоретически обосновал зависимость частоты колебаний, воспринимаемых наблюдателем, от скорости и направления движения источника волны и наблюдателя относительно друг друга.
Доплеровский метеорологический радиолокатор
В 1848 году эффект Доплера был уточнен французским физиком Арманом Физо, а в 1900 году – экспериментально проверен русским ученым Аристархом Белопольским на лабораторной установке. В этой связи в научно-технической литературе наименование данного эффекта можно встретить под названием «эффект Доплера – Белопольского».
Для проведения процедуры измерения расстояния до цели РЛС излучает в ее направлении зондирующий сигнал. Данный сигнал доходит до объекта, отражается от него и возвращается обратно к РЛС. Поскольку, как отмечалось ранее, скорость распространения радиосигнала в однородной среде постоянная, то для определения дальности до объекта необходимо зафиксировать момент излучения зондирующего сигнала t и момент приема отраженного сигнала от цели t1. В результате разность (t1 – t) позволяет определить время, в течение которого радиоволна проходит путь от РЛС к цели и обратно, которое равно 2Д, где Д – дальность до объекта (расстояние между РЛС и целью). Разность времен (t1 – t) в радиолокации называют временем запаздывания и обозначают как tд. В результате при известной величине tд можно составить равенство 2Д = Сtд, из которого следует, что дальность до объекта (цели) равна Д = Сtд/2.
Таким образом, подводя итог процедуре измерения дальности до цели, можно констатировать, что для измерения с помощью РЛС расстояния до цели необходимо определить время запаздывания tд, которое при известной скорости распространения радиоволн позволяет определить дальность до нее.
Большой процент объектов радиолокационного наблюдения составляют подвижные или движущиеся цели. К таким целям, например, относятся самолеты, вертолеты, автомобили, люди и т.д. Основным отличительным признаком таких объектов является скорость их движения. Выявить эффект движения цели, как отмечалось ранее, можно, опираясь на эффект Доплера, который позволяет определить радиальную скорость движения цели. То есть частота принимаемых РЛС колебаний от цели, двигающейся ей навстречу, возрастает по сравнению со случаем неподвижной цели и уменьшается при удалении цели от РЛС. Данное изменение частоты принимаемого сигнала называют доплеровским смещением частоты. Величина данного смещения зависит от скорости взаимного движения носителя РЛС и цели. Необходимо заметить, что рассмотренные свойства радиоволн будут проявляться вне зависимости от условий оптической видимости в зоне радиолокационного наблюдения.
Вторичный радиолокатор
Вторичная радиолокация используется в авиации для опознавания. Основная особенность — использование активного ответчика на самолётах.
Принцип действия вторичного радиолокатора несколько отличается от принципа первичного радиолокатора. В основе устройства Вторичной радиолокационной станции лежат компоненты: передатчик, антенна, генераторы азимутальных меток, приёмник, сигнальный процессор, индикатор и самолётный ответчик с антенной.
Передатчик служит для формирования импульсов запроса в антенне на частоте 1030 МГц.
Антенна служит для излучения импульсов запроса и приёма отражённого сигнала. По стандартам ICAO для вторичной радиолокации антенна излучает на частоте 1030 МГц и принимает на частоте 1090 МГц.
Генераторы азимутальных меток служат для генерации азимутальных меток (англ. Azimuth Change Pulse, ACP) и метки Севера (англ. Azimuth Reference Pulse, ARP). За один оборот антенны РЛС генерируется 4096 масштабных азимутальных меток (для старых систем) или 16384 улучшенных масштабных азимутальных меток (англ. Improved Azimuth Change pulse, IACP — для новых систем), а также одна метка Севера. Метка севера приходит с генератора азимутальных меток при таком положении антенны, когда она направлена на Север, а масштабные азимутальные метки служат для отсчёта угла разворота антенны.
Приёмник служит для приёма импульсов на частоте 1090 МГц.
Сигнальный процессор служит для обработки принятых сигналов.
Индикатор служит для отображения обработанной информации.
Самолётный ответчик с антенной служит для передачи содержащего дополнительную информацию импульсного радиосигнала обратно в сторону РЛС по запросу.
Принцип действия вторичного радиолокатора заключается в использовании энергии самолётного ответчика для определения положения воздушного судна. РЛС облучает окружающее пространства запросными импульсами P1 и P3, а также импульсом подавления P2 на частоте 1030 МГц. Оборудованные ответчиками воздушные суда, находящиеся в зоне действия луча запроса, при получении запросных импульсов, если действует условие P1,P3>P2, отвечают запросившей РЛС серией кодированных импульсов на частоте 1090 МГц, в которых содержится дополнительная информация о номере борта, высоте и так далее. Ответ самолётного ответчика зависит от режима запроса РЛС, а режим запроса определяется интервалом времени между запросными импульсами P1 и P3, например, в режиме запроса А (mode A) интервал времени между запросными импульсами станции P1 и P3 равен 8 микросекундам и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свой номер борта.
В режиме запроса C (mode C) интервал времени между запросными импульсами станции равен 21 микросекунде и при получении такого запроса ответчик воздушного судна кодирует в импульсах ответа свою высоту. Также РЛС может посылать запрос в смешанном режиме, например, Режим А, Режим С, Режим А, Режим С. Азимут воздушного судна определяется углом поворота антенны, который, в свою очередь, определяется путём подсчёта масштабных азимутальных меток.
Принцип радиотелефонной связи
Первую передачу информации на расстоянии осуществил русский ученый Александр Степанович Попов (рис. 1).
Рис. 1. Александр Степанович Попов (Источник)
Для этой цели А.С. Попов использовал известную всем азбуку Морзе. Именно ему удалось осуществить радиосвязь, то есть передачу информации при помощи электромагнитных волн. Она заключалась в том, что при помощи точек и тире сообщалась некая информация.
Чем же отличается телефонная радиосвязь от радиосвязи?
Радиотелефонной связью мы называем передачу информации, речи, музыки на большие расстояния при помощи электромагнитных волн. Принцип радиотелефонной связи заключается в следующем: в передающей антенне создается высокочастотный переменный электрический ток, этот ток вокруг передающей антенны создает переменное электромагнитное поле, которое распространяется в виде электромагнитных волн. Такая волна, попадая на приемную антенну, возбуждает в приемной антенне ток той же частоты, что и был произведен при излучении, и таким образом осуществляется радиосвязь, то есть при помощи электромагнитных волн. Для того чтобы обеспечить такую связь, нужны специальные устройства. Во времена А.С. Попова и Генриха Герца, который впервые осуществил излучение электромагнитной волны и ее прием, источники электромагнитных колебаний были очень слабы, и поэтому на большие расстояния электромагнитная волна распространяться не могла. Тем не менее А.С. Попову удалось осуществить связь на расстоянии более 70 километров.
В наше время радиосвязь осуществляется по всему земному шару, даже за его пределами. Вопрос с производством высокочастотных колебаний был решен в 1913 году, когда был создан генератор незатухающих электромагнитных колебаний (рис. 2).
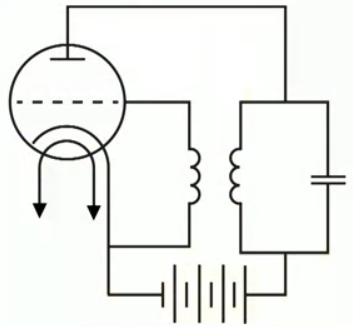
Рис. 2. Генератор незатухающих электромагнитных колебаний (Источник)
Главной частью генератора является трехэлектродная лампа – триод, которая состоит из трех частей: анод, сетка и катод. Вот такая лампа является основной частью любого генератора незатухающих колебаний.
Рассмотрим схему устройства передатчика электромагнитных волн или передающего устройства (рис. 3):
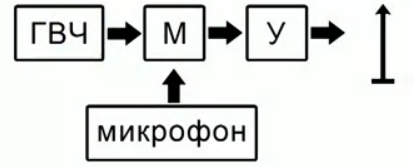
Рис. 3. Передатчик электромагнитных волн (Источник)
В первую очередь это генератор высокой частоты (ГВЧ), соединенный с модулятором (М), на который поступает звук от микрофона. В микрофоне механические колебания, звуковые колебания преобразуются в электрические колебания низкой частоты, и эти колебания от генератора высокой частоты и микрофона соединяются в модуляторе.
После усилителя (У) промодулированный сигнал поступает на передающую антенну, и уже этот сигнал выходит в эфир.
Слово «модуляция» означает «размеренность». Рассмотрим, как осуществляется модуляция в передающей части и из чего она состоит (рис. 4).
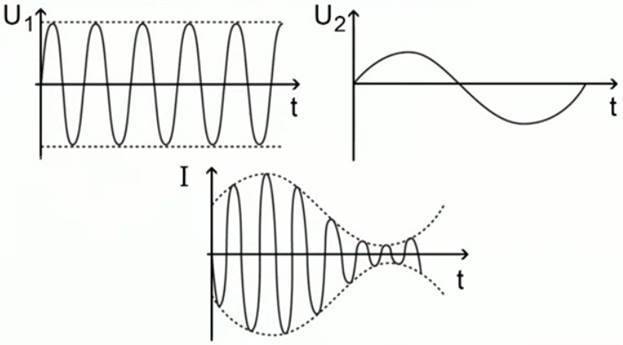
Рис. 4. Модуляция в передающей части (Источник)
На первой части рисунка изображены высокочастотные колебания, по вертикали расположено напряжение (U1), которое изменяется синусоидально и за очень маленький промежуток времени проходит очень много колебаний.
Вторая часть рисунка соответствует электрическим сигналам, которые поступают на модулятор от микрофона, это низкочастотные сигналы.
Когда в модуляции происходит объединение этих сигналов, мы наблюдаем высокочастотную составляющую, которая меняется по амплитуде в соответствии сигналам низких частот.
Этот процесс называется амплитудная модуляция.
Сегодня амплитудная модуляция – хорошо изученный и отработанный элемент, поэтому очень часто используется в радиосвязи, то есть когда мы слушаем радио, мы используем амплитудно-модулированный сигнал.
Существуют и другие способы модуляции: частотная модуляция или фазовая модуляция, они тоже нашли свое применение.
В чем разница между первичным и вторичным радиолокаторами?
Сравнительная характеристика первичного
Основной особенностью первичных радиолокационных устройств является то,
что они работают с пассивным эхо-сигналом.
Излученные высокочастотные импульсы отражаются целью и затем принимаются тем же
радиолокационным устройством.
Таким образом, непосредственной причиной возникновения отраженного эхо-сигнала является зондирующий сигнал,
излучаемый радиолокационным устройством.
и вторичного радиолокаторов
Вторичные радиолокационные устройства работают по
иному принципу:
они используют активные ответные сигналы.
Вторичное радиолокационное устройство также излучает зондирующий сигнал, называемый запросным.
Когда этот сигнал достигает цели, он принимается бортовым
активным ответчиком,
в котором выполняется его обработка.
После этого формируется и излучается ответный сигнал на другой частоте, содержащий
ответное сообщение.
Системы обоих типов, в силу различия принципов построения, имеют свои достоинства и недостатки.
Так, первичный радиолокатор обеспечивает достоверную информацию об угловых координатах, высоте и дальности цели.
В то же время вторичный радиолокатор может получать дополнительную информацию, такую как, например,
сигналы опознавания государственной принадлежности и
высота.
Последнее является весьма полезным свойством, поскольку точность измерения высоты бортовыми высотомерами выше,
чем точность наземных высотомеров.
Следует помнить, что вторичная радиолокация требует наличия на борту специального оборудования.
Однако именно благодаря этому появляется возможность существенно уменьшить мощность передатчика при
сохранении такого же значения максимальной дальности действия, что и в случае первичной радиолокации.
Это легко поясняется тем, что излучаемая мощность входит в
уравнение радиолокации
совместно с удвоенной дальностью до цели в случае первичной радиолокации и однократной дальностью — в случае вторичной радиолокации:
Рисунок 1. Калибровочные кривые приемников, различные чувствительности первичного (PSR) и вторичного (SSR) радиолокационных приемников
Рисунок 1. Калибровочные кривые приемников, различные чувствительности первичного (PSR) и вторичного (SSR) радиолокационных приемников
В качестве оценочного значения можно принять снижение мощности передатчика в 1000 раз.
Это означает, что в таком случае может быть использован более простой, компактный и дешевый передатчик.
Приемник может обладать худшей чувствительностью, поскольку мощность сигналов активного ответа больше мощности пассивного эхо-сигнала.
Однако по этой же причине возрастает негативное влияние сигналов, принятых по
боковым лепесткам.
По этой причине при построении вторичных радиолокаторов, как правило,
предпринимаются дополнительные меры по
подавлению боковых лепестков.
Поскольку излучение и прием происходит на отличающихся друг от друга частотах, пассивные помехи не возникают,
следовательно отпадает необходимость в системе селекции движущихся целей.
С другой стороны, при подавлении активными помехами изменение частоты невозможно.
Специфические помехи,
имеющие место при использовании вторичных радиолокационных устройств вызывают необходимость дополнительных схемных решений.







